

Sensor MEMS IMU AHRS INS de grado táctico U4500 para navegación de robots marinos y vehículos aéreos no tripulados (UAV).

Los sensores de la serie U4500 están compuestos por sistemas IMU/VRU/MRU/AHRS/INS de alto rendimiento diseñados con tecnología MEMS-IMU de grado táctico, y están equipados con algoritmos de análisis dinámico de ruido IMU, algoritmos de estimación de cabeceo, algoritmos de análisis del estado de movimiento de la portadora y algoritmos de fusión GNSS desarrollados de forma independiente, que pueden proporcionar a los usuarios información precisa sobre la posición, la actitud, la velocidad y otros datos.
Los sensores de la serie U4500 transmiten datos a través de interfaces UART/CAN y ofrecen una amplia gama de configuraciones de usuario. (Se requiere un transceptor externo para la comunicación CAN).
La serie U4500 puede sincronizarse con el sistema mediante activación externa, puede recibir la hora UTC y también puede alinear la hora con sistemas externos como radares y cámaras mediante la función de salida síncrona.
Un ordenador de sobremesa multifuncional (GUI) puede ayudar a evaluar rápidamente el producto, y estas funciones incluyen, entre otras, la configuración de módulos, la visualización de datos, la actualización del firmware, el registro de datos, etc.
Número de pieza, :
U4500Pedido (MOQ) :
1Series de productos y parámetros
| Parámetros de fusión | Condición | U4500-A | U4500-B | U4500-C | U4500-D | Unidad |
| Cabeceo/balanceo)① | 0,05 (nominal), 0,1 (máx.) | ° | ||||
| Resolución | 0,01 | ° | ||||
| Encabezado (VRU/MRU) )① | 0,2 (nominal), 0,3 (máx.) | ° | ||||
| Encabezado (AHRS) ② | 0,5 (nominal), 2 (máximo) | |||||
| Resolución | 0,01 | |||||
| Hora de inicio | IMU/VRU | 2 | s | |||
| MRU (estático) | 60 | |||||
| MRU (mar) | 180 | |||||
| Tirón | / | 5/5% (nominal) | cm | |||
| período de vómitos | 1~10 (nominal) | s | ||||
| Notas: ①: Prueba de rotación del plato giratorio. ②: Medido bajo la condición de que no haya interferencia de campo magnético alrededor después de la calibración geomagnética, y el producto debe estar configurado en modo AHRS. |
||||||
| Giroscopio | Condición | U4500-A | U4500-B | U4500-C | U4500-D | Unidad |
| Rango de medición | ±300 | °/s | ||||
| Resolución | 16 | poco | ||||
| Error lineal① | 300°/s -40℃-110℃ 100°/s -40℃-110℃ |
±0,15 (nominal), ±0,3 (máx.) | °/s | |||
| error transversal | ±0,15 (máx.) | % | ||||
| Ancho de banda de 3 dB | 235 (nominal), 250 (máx.) | Hz | ||||
| Frecuencia de muestreo | 1000 | Hz | ||||
| Densidad de ruido | XY: 0,0004 Z: 0,0006 |
(°/s)/√Hz | ||||
| Inestabilidad de polarización cero② | Varianza de Allan | 0,3 | °/h, 1σ | |||
| Estabilidad de polarización cero | 10 segundos sin problemas | 0,5 | °/h, 1σ | |||
| Repetibilidad de sesgo cero | 0,8 | °/h, 1σ | ||||
| Paseo aleatorio angular③ | Varianza de Allan | XY: 0,015 Z: 0,025 |
°/√Hz, 1σ | |||
| Polarización cero a temperatura completa | -40-85℃ | XY: 0,25 (máx.) Z: 0,01 (nominal), 0,03 (máx.) |
°/s | |||
| Sensibilidad del acelerómetro | Para una entrada de gravedad constante | 0,00075 | °/s/g | |||
| Notas: ①: El error lineal es la desviación máxima en un rango especificado con respecto a la línea de mejor ajuste determinada por los valores medidos. ②: El valor obtenido al dividir el valor mínimo de la varianza de Allan por 0,664. Durante la medición, se utiliza un filtro de paso bajo de 13 Hz y una frecuencia de muestreo de 200 Hz, y debe haber un tiempo de estabilización de 15 minutos antes de comenzar la recopilación de datos para garantizar una estabilidad térmica completa. ③: El paseo aleatorio angular es un término de ruido blanco estimado a partir de la desviación de Allan en una constante de tiempo τ = 1 segundo. |
||||||
| Acelerómetro | Condición | U4500-A | U4500-B | U4500-C | U4500-D | Unidad |
| Rango de medición | ±16 | g | ||||
| Resolución | 16 | poco | ||||
| Polarización inicial cero | 2 | mg | ||||
| Error lineal① | 8 g -40 ℃-110 ℃ | ±3 (nominal), ±15 (máx.) | mg | |||
| 1 g -40 ℃-110 ℃ | ||||||
| error transversal | ±0,15 (máx.) | % | ||||
| Ancho de banda de 3 dB | 210 (nominal), 235 (máx.) | Hz | ||||
| Frecuencia de muestreo | 1000 | Hz | ||||
| Densidad de ruido | 0,0008 | m/s2/√Hz, 1σ | ||||
| Inestabilidad de polarización cero② | Varianza de Allan | 0,01 | mg | |||
| Estabilidad de polarización cero | 10 segundos sin problemas | 0,03 | mg | |||
| Repetibilidad de sesgo cero | 0,04 | mg | ||||
| Paseo aleatorio angular③ | Varianza de Allan | 0,03 | m/s√h, 1σ | |||
| Polarización cero a temperatura completa | -40-85℃ | 0,5 (nominal), 2 (máximo) | mg | |||
| Notas: ①: El error lineal es la desviación máxima en un rango especificado con respecto a la línea de mejor ajuste determinada por los valores medidos. ②: El valor obtenido al dividir el valor mínimo de la varianza de Allan por 0,664. Durante la medición, se utiliza un filtro de paso bajo de 13 Hz y una frecuencia de muestreo de 200 Hz, y debe haber un tiempo de estabilización de 15 minutos antes de comenzar la recopilación de datos para garantizar una estabilidad térmica completa. ③: El paseo aleatorio angular es un término de ruido blanco estimado a partir de la desviación de Allan en una constante de tiempo τ = 1 segundo. |
||||||
| Magnetómetro | Condición | U4500-A | U4500-B | U4500-C | U4500-D | Unidad |
| Rango | / | ±20 | Gauss | |||
| Ruido | / | 450 | nT | |||
| Linealidad | / | 20 | uT | |||
| Sensor de temperatura | Condición | U4500-A | U4500-B | U4500-C | U4500-D | Unidad |
| Rango | -40 – 135 | ℃ | ||||
| Error de desplazamiento | ±1 | ℃ | ||||
| Barómetro | Condición | U4500-A | U4500-B | U4500-C | U4500-D | Unidad |
| Rango | / | 300 ~ 1200 | hPa | |||
| Resolución | / | 0,006 | hPa | |||
| Exactitud | / | ±0,06 | hPa | |||
| Mecánica/Medio ambiente | Condición | U4500-A | U4500-B | U4500-C | U4500-D | Unidad |
| Fuente de alimentación VDD | 3,6 - 5,5 | V | ||||
| Consumo de energía | 370 (máx.) | mW | ||||
| VOL | 0,4 (máx.) | V | ||||
| VOH | 2,6 (min) | V | ||||
| VIL | -0,3 (mín.), 1 (máx.) | V | ||||
| VIH | 1,9 (mín.), 3,6 (máx.) | V | ||||
| Temperatura de funcionamiento | -125 | ℃ | ||||
| Temperatura de almacenamiento | -165 | ℃ | ||||
| Dimensión | 24x24x14 | mm | ||||
| Material y proceso de la carcasa | Aleación de aluminio CNC | |||||
| protección del medio ambiente | Directiva RoHS 2011/65/UE | |||||
| EMC | Directiva LVD 2014/35/UE | |||||
| Prueba de caída | Caída libre 3 veces sobre una plataforma experimental de 75 cm de altura. | |||||
| choque térmico | Elevar la temperatura de -40 a 85 ℃ en 1 hora, 5 veces. | |||||
| MTBF | 30000 | h | ||||
| Impacto mecánico | 10000 | g | ||||
| ESD HBM | 2 kV | JEDEC/ESDA JS-001 | ||||
| Interfaz | Condición | Min | Normal | Máximo | Unidad | |
| UART1/UART2 UART3 PODER |
Velocidad de transmisión | 9600 | 115200 | 921600 | latidos por segundo | |
| Posición inicial | 0 | 100 | 1000 | Hz | ||
| 115200 | latidos por segundo | |||||
| Velocidad de transmisión | 125 | 500 | 1000 | kbps | ||
| Velocidad de fotogramas de salida | 0 | 100 | 200 | Hz |
proceso de producción
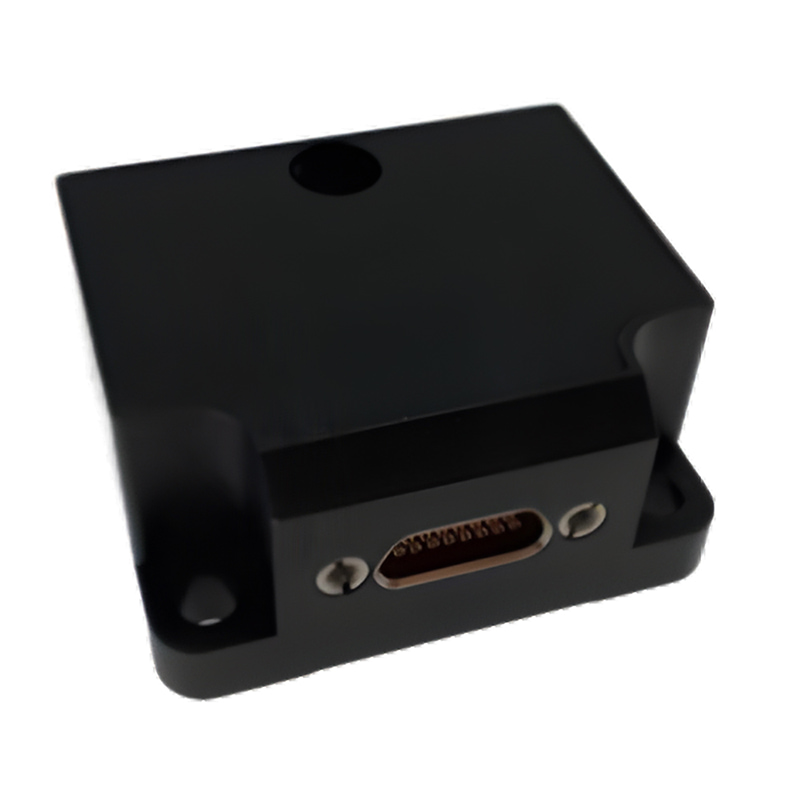
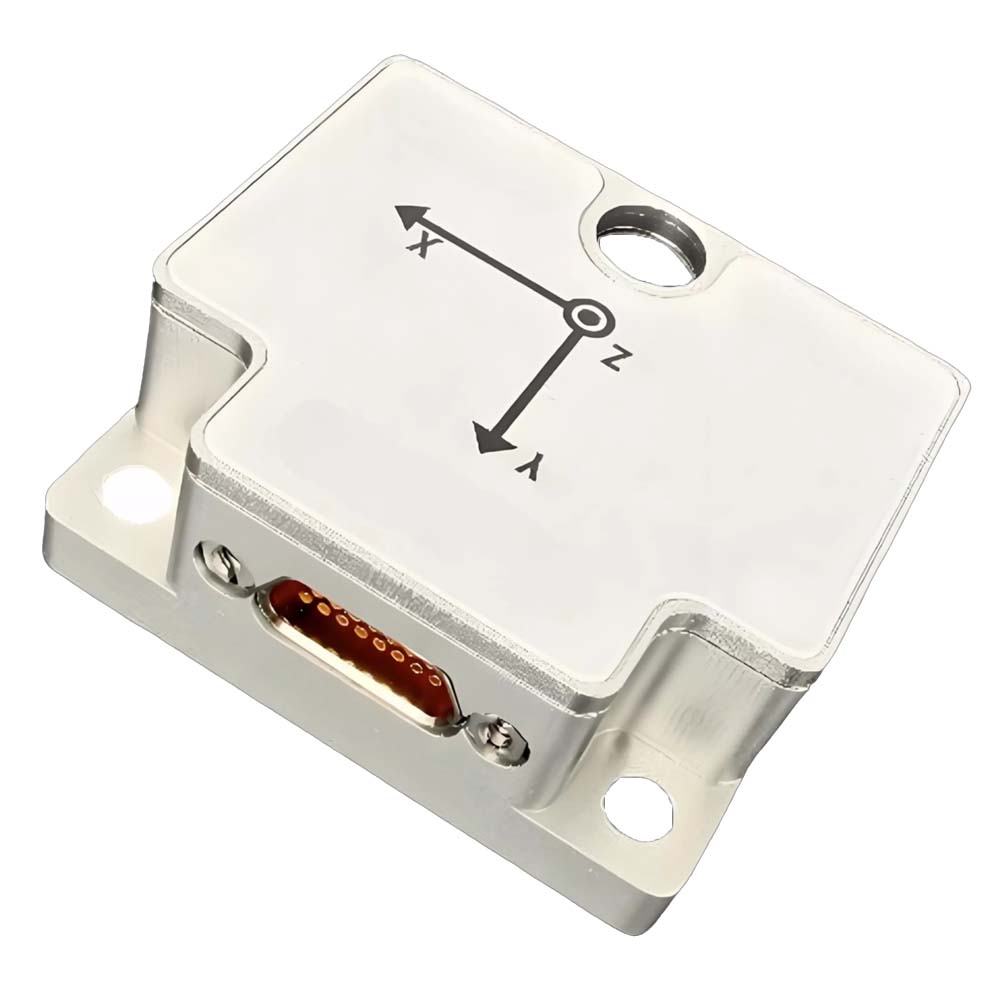
Dimensiones del producto

Escenarios de aplicación



Preguntas frecuentes
1. ¿Para qué se utiliza el U4500?
El U4500 es un sensor MEMS IMU / VRU / MRU / AHRS / INS de grado táctico diseñado para la referencia de actitud de UAV, robots no tripulados de baja velocidad, instrumentos subterráneos, compensación activa de olas, control de actitud de buques, posicionamiento dinámico, estabilización de plataformas y maquinaria de construcción.
2. ¿Qué interfaces admite el U4500?
El U4500 admite interfaces UART y CAN. El bus CAN requiere un transceptor CAN externo para su uso.
3. ¿Qué funciones puede proporcionar el U4500?
El U4500 integra múltiples funciones, incluyendo IMU, VRU, MRU, AHRS e INS. Puede proporcionar datos de aceleración, velocidad angular, campo geomagnético, presión atmosférica, ángulos de Euler, cuaterniones, cabeceo y, cuando se conecta a un GNSS externo, información de posición, velocidad, actitud y sincronización.













Xml política de privacidad blog Mapa del sitio
Derechos de autor @ Micro-Magic Inc Reservados todos los derechos.
 RED COMPATIBLE
RED COMPATIBLE



 Español
Español












