

Sistema de navegación inercial integrado MEMS de alta precisión GNSS RTK para vehículos, barcos y UAVs
El sistema de navegación integrado de alta precisión I7200 es un sistema inercial/satelital integrado que ofrece alta precisión, fiabilidad y rentabilidad. Puede integrar información externa, como la odometría, y se utiliza ampliamente en los campos de navegación, control y medición en vehículos, barcos y drones. Este sistema de alta precisión cuenta con capacidad de autoorientación y ofrece diversas configuraciones para adaptarse a diferentes aplicaciones.
Número de pieza, :
I7200Pedido (MOQ) :
1Series de productos y parámetros
| Parámetro | Indicadores técnicos |
| Giroscopio | |
| Rango (°/s) | ±200 |
| Polarización cero a temperatura completa (°/h, 3σ) | ≤0,5 |
| Estabilidad de polarización cero (°/h, 10 s) | ≤0,1 |
| Inestabilidad de polarización cero (°/h, allan, típ.) | ≤0,02 |
| Repetibilidad de sesgo cero (°/h) | ≤0,1 |
| Paseo aleatorio angular (°/√h) | ≤0,01 |
| No linealidad del factor de escala (ppm) | ≤100 |
| Acoplamiento cruzado de ejes (rad) | ≤0,001 |
| Ancho de banda (Hz) | ≥50 |
| Acelerómetro | |
| Rango (g) | ±10 |
| Polarización cero a temperatura completa (mg, 3σ) | ≤1 |
| Estabilidad de polarización cero (μg, 10 s) | ≤30 |
| Inestabilidad de polarización cero (μg, allan, typ) | ≤10 |
| Repetibilidad de polarización cero (ug) | ≤30 |
| Paseo aleatorio de velocidad (m/s/√h) | ≤0,02 |
| No linealidad del factor de escala (ppm, ±1 g) | ≤100 |
| Acoplamiento cruzado de ejes (rad) | ≤0,001 |
| Ancho de banda (Hz) | ≥50 |
| Módulo GNSS | |
| Señal | BDS:B1I, B2I, B3I,B1C*,B2b* GPS: L1C/A, L2C, L2P(Y), L5 GLONASS: G1, G2 Galileo: E1, E5a, E5b, E6* QZSS:L1C/A, L2C, L5, L6* SBAS: L1C/A |
| Posicionamiento de punto único (RMS) | Nivel 1,5 m, elevación 2,5 m |
| Posicionamiento RTK (RMS) | Planar 0,8 cm + 1 ppm Elevación: 1,5 cm + 1 ppm |
| Tiempo hasta la primera reparación (TTFF) | El tiempo de arranque en frío es inferior a 30 segundos. |
| Tiempo de inicialización de RTK | <5s |
| Precisión direccional (RMS) | 0,1°/2m (línea base) |
| Precisión horaria (RMS) | 20ns |
| Precisión de velocidad (RMS) | 0,05 m/s |
| Características de la antena | |
| Rango de frecuencia | GPS L1/L2/L5 BDS B1/B2/B3 GLONASS L1/L2/L3 GALILEO E1/E5a/E5b Banda L |
| Impedancia | 50 ohmios |
| Modo de polarización | Polarización circular dextrógira |
| Relación axial de la antena: | ≤3 dB |
| Ángulo de cobertura horizontal | 360° |
| onda estacionaria | ≤2 |
| error del centro de fase | ±2 mm |
| Ganar | 36±2dB |
| Figura de ruido | ≤2 dB |
| onda estacionaria | ≤2 |
| Voltaje de funcionamiento | 3,3~12 V CC |
| Corriente de funcionamiento | ≤45 mA |
| Supresión fuera de banda (±100 MHz) | ≥40 dB |
| Precisión de navegación | |
| Precisión de la búsqueda automática del norte (°, 1σ) | ≤1 |
| Posición horizontal combinada (m, 1σ) | ≤2 (punto único) ≤ 0,02 + 1 ppm (RTK) |
| Posición combinada en el cielo (m, 1σ) | ≤3 (punto único), ≤0,03+1 ppm (RTK) |
| Velocidad horizontal combinada (m/s, 1σ) | ≤0,05 |
| Velocidad combinada hacia el cielo (m/s, 1σ) | ≤0,1 |
| Rumbo combinado (°, 1σ) | ≤0,1 (antena dual de línea base de 2 m) ≤0,1 (punto único, dinámico) ≤0,05 (RTK, dinámico) ≤0,03 (posprocesamiento) |
| Actitud horizontal combinada (°, 1σ) | ≤0,015 (punto único, dinámico) ≤0,01 (RTK, dinámico) ≤0,007 (posprocesamiento) |
| Precisión puramente inercial tras la pérdida de sincronización (1σ, 60 s) | ≤1 |
| Precisión en la medición de altura | ≤5 cm |
| Interfaz eléctrica/mecánica | |
| Fuente de alimentación (V) | 9~36 |
| Potencia en estado estacionario (W) | 4 |
| Tiempo de inicio (s) | 2 |
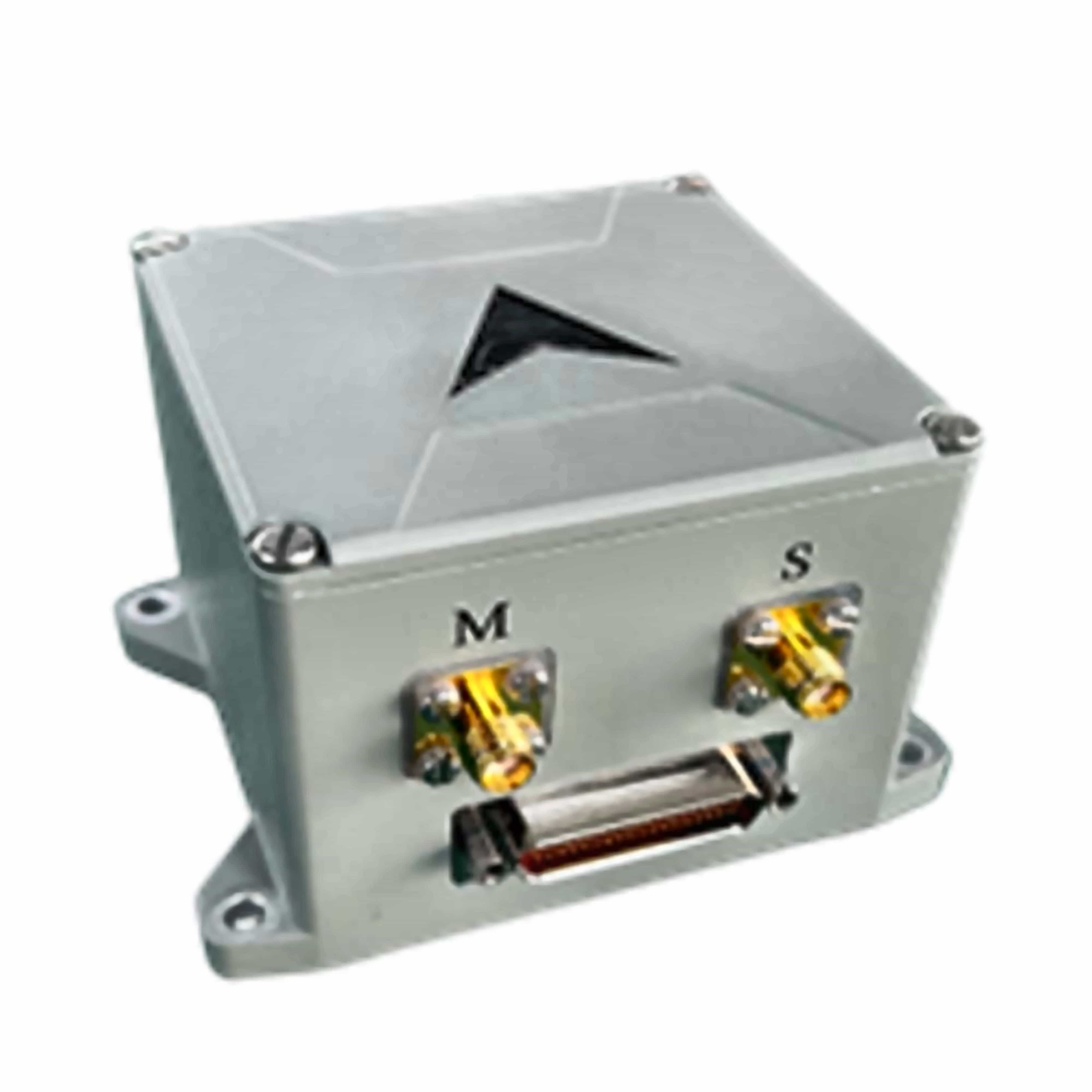
| Interfaz de comunicación | Puerto RS-422/RS-232/CAN/USB/Ethernet |
| Almacenamiento interno | 16G |
| Frecuencia de actualización (Hz) | 200 (personalizable) |
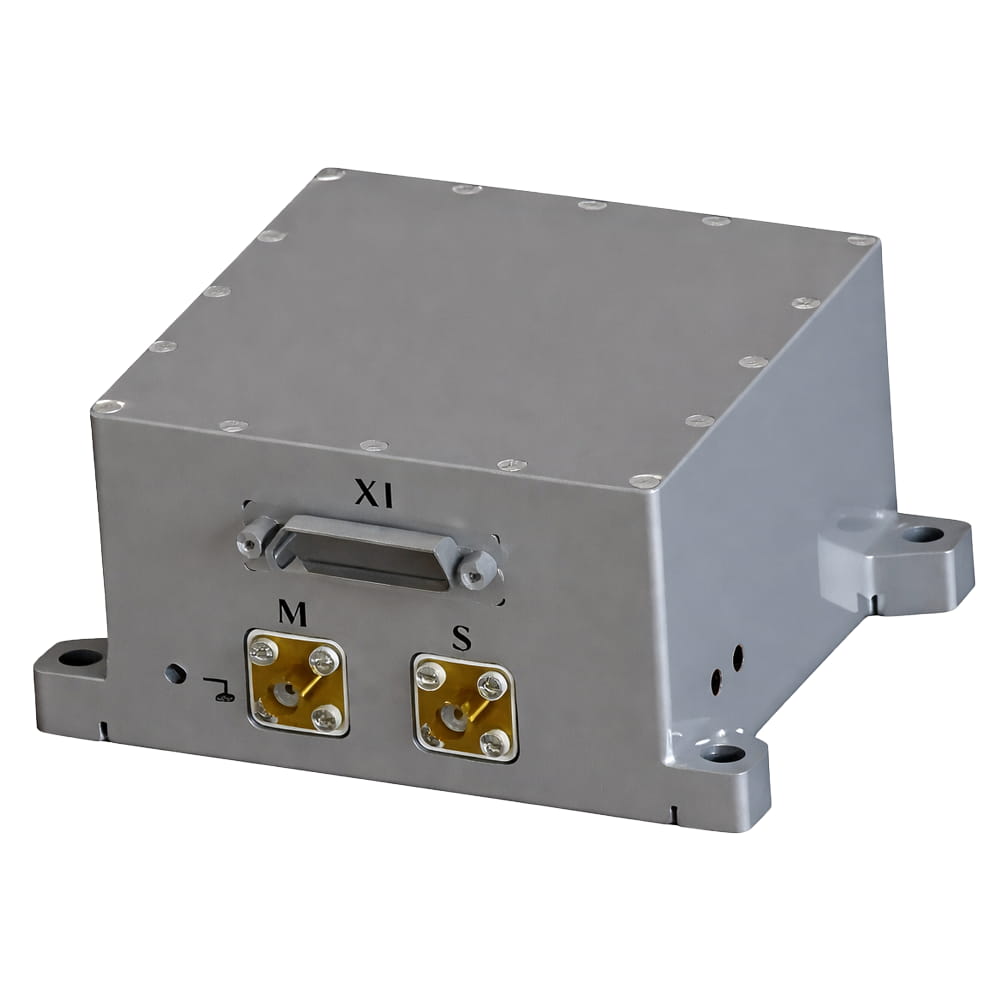
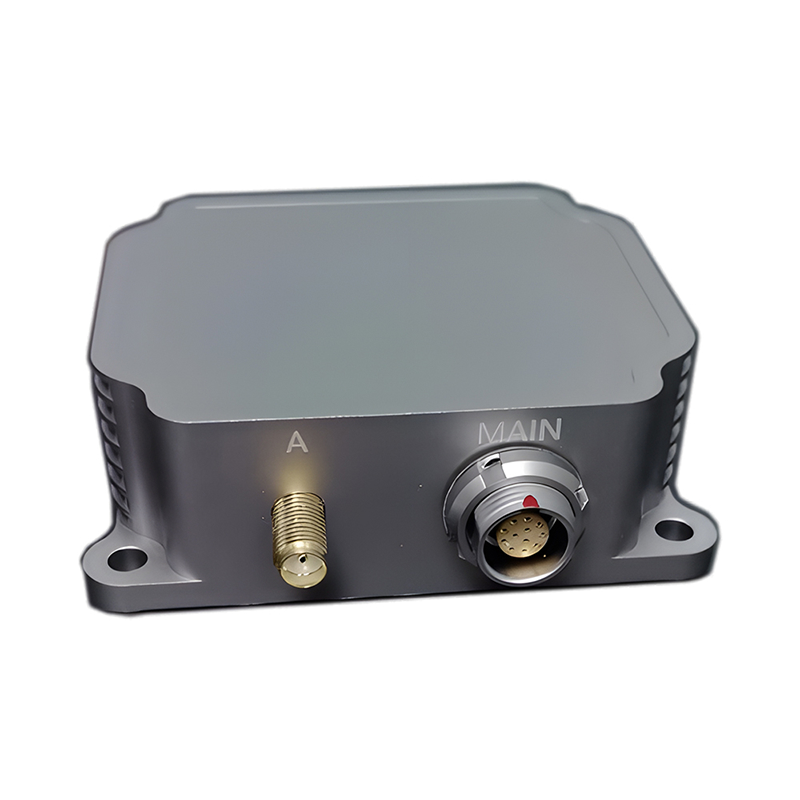
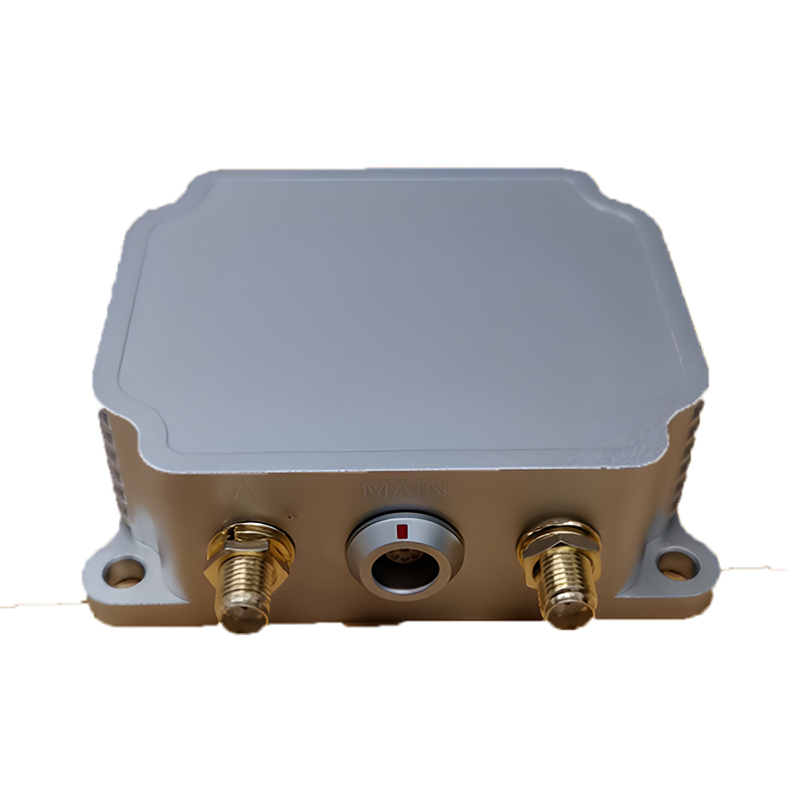
| Tamaño (mm×mm×mm) | 93×85×49,5 |
| Peso (g) | ≤500 |
| Entorno operativo | |
| Temperatura de funcionamiento (°C) | -40~+80 |
| Temperatura de almacenamiento (℃) | -55~+85 |
| Vibración (g, RMS) | 20~2000 Hz, 6,06 |
| Choque (g) | 1000 g/1 ms |
| Fiabilidad | |
| MTBF (h) | 20000 |
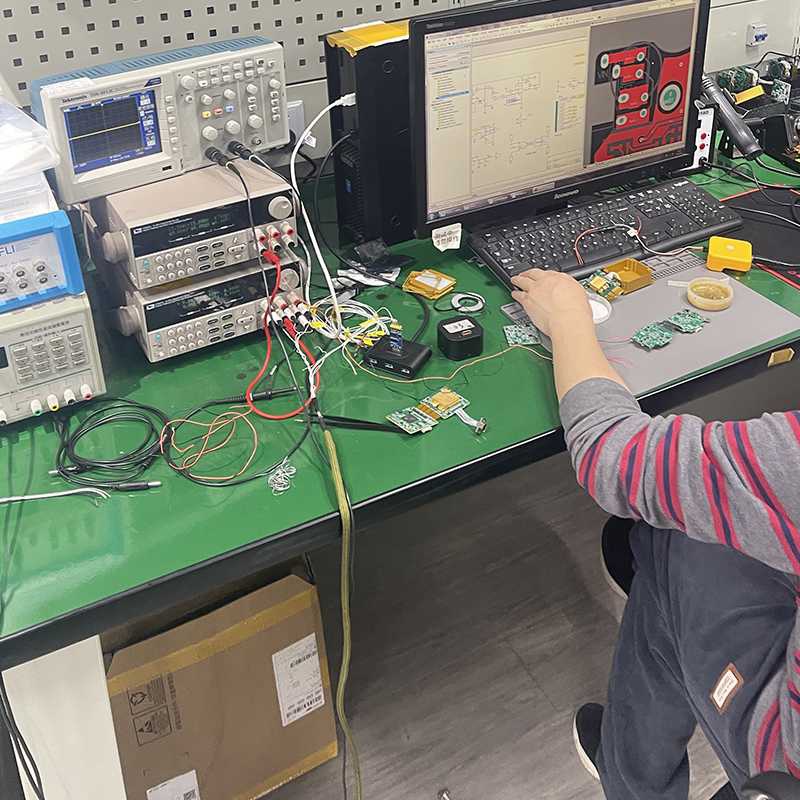
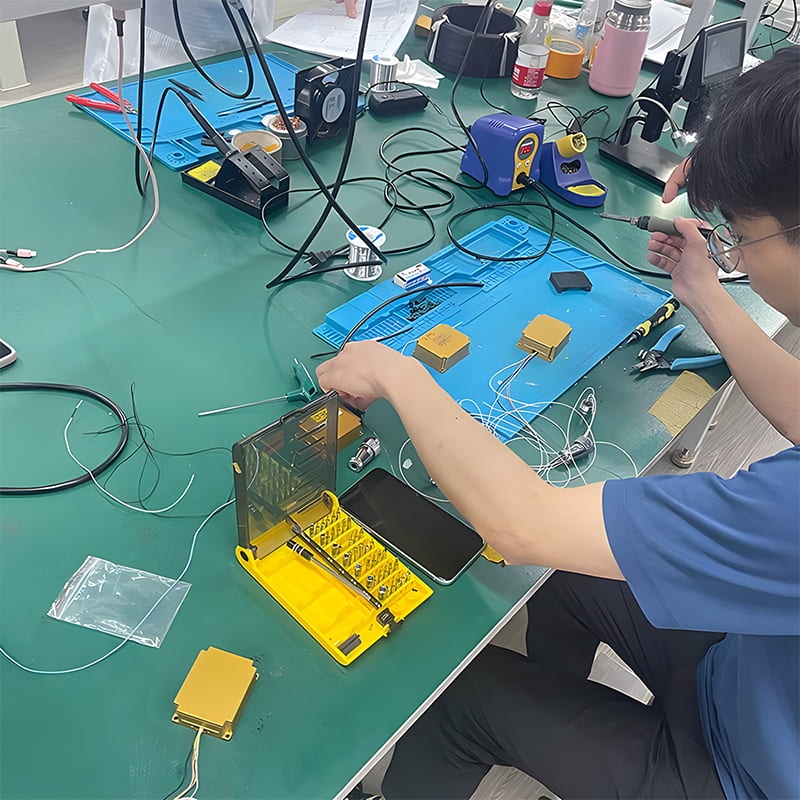
proceso de producción
Dimensiones del producto

Escenarios de aplicación



Preguntas frecuentes
P1. ¿Qué es el I7200?
El I7200 es un sistema integrado de navegación inercial/satélite de alta precisión, gran fiabilidad y excelente relación coste-beneficio. Puede integrar información externa, como datos de odometría, y es adecuado para aplicaciones de navegación, control y medición.
P2. ¿Cuáles son las principales características del I7200?
El I7200 ofrece alto rendimiento, diseño ligero, adaptabilidad a entornos complejos, numerosas interfaces con medidas de aislamiento, detección automática del norte, capacidad de integración RTK y un algoritmo de restricción cinemática.
P3. ¿Para qué aplicaciones es adecuado el I7200?
El I7200 admite la salida en tiempo real de información de navegación 3D y datos IMU, almacenamiento interno de datos brutos IMU+GNSS, posicionamiento y orientación GNSS de alta precisión en entornos complejos, y es adecuado para vehículos, barcos, drones y plataformas similares.






Xml política de privacidad blog Mapa del sitio
Derechos de autor @ Micro-Magic Inc Reservados todos los derechos.
 RED COMPATIBLE
RED COMPATIBLE



 Español
Español














