

Sistema de navegación INS/GNSS integrado de alta precisión MEMS I6700, RTK, antena dual, salida de 200 Hz, 9-36 V, ≤4 W
El sistema de navegación integrado MEMS de la serie I6700 es de alta precisión, alta fiabilidad y rentable. Sistema de navegación inercial integrado MEMS, que pueden utilizarse ampliamente en los campos de navegación, control y medición representados por vehículos, barcos y drones.
El sistema de navegación integrado de la serie I6700 integra giroscopios MEMS de alto rendimiento, acelerómetros MEMS y chips receptores GNSS para satélites. Al detectar la velocidad angular y la aceleración de la rotación terrestre, determina la dirección real del movimiento de la nave mediante autoalineación estática y la integra con la velocidad, la posición y la dirección tridimensionales obtenidas del receptor GNSS para una navegación integrada. El sistema de navegación integrado realiza una compensación de deriva térmica con sesgo cero y una compensación de escala de temperatura completa en el módulo IMU interno para garantizar la fiabilidad del producto.
El producto ofrece diversos modos de configuración para adaptarse a diferentes portadores, como aeronaves, vehículos y buques. Los modos de escenario adecuados ayudan a garantizar la precisión de la medición de la actitud del portador a largo plazo.
Número de pieza, :
I6700Pedido (MOQ) :
1Series de productos y parámetros
| Parámetro | Indicadores técnicos | ||
| I6700-A | I6700-B | I6700-C | |
| Giroscopio | |||
| Rango (°/s) | ±200 | ±400 | ±300 |
| Polarización cero a temperatura completa (°/h, 3σ) | ≤0,3 | ≤2 | ≤80 |
| Estabilidad de polarización cero (°/h, 10 s) | ≤0,1 | ≤0,5 | ≤3 |
| Inestabilidad de polarización cero (°/h, allan, típ.) | ≤0,02 | ≤0,05 | ≤0,5 |
| Repetibilidad de sesgo cero (°/h) | ≤0,1 | ≤0,3 | ≤3 |
| Paseo aleatorio angular (°/√h) | ≤0,01 | ≤0,02 | ≤0,025 |
| No linealidad del factor de escala (ppm) | ≤100 | ≤100 | ≤100 |
| Acoplamiento cruzado de ejes (rad) | ≤0,001 | ≤0,001 | ≤0,001 |
| Ancho de banda (Hz) | ≥50 | ≥200 | ≥200 |
| Acelerómetro | |||
| Rango (g) | ±10 | ±30 | ±20 |
| Polarización cero a temperatura completa (mg, 3σ) | ≤0,5 | ≤2 | ≤2 |
| Estabilidad de polarización cero (μg, 10 s) | ≤20 | ≤50 | ≤50 |
| Inestabilidad de polarización cero (μg, allan, typ) | ≤10 | ≤30 | ≤30 |
| Repetibilidad de polarización cero (ug) | ≤20 | ≤50 | ≤60 |
| Paseo aleatorio de velocidad (m/s/√h) | ≤0,02 | ≤0,03 | ≤0,04 |
| No linealidad del factor de escala (ppm, ±1 g) | ≤100 | ≤100 | ≤100 |
| Acoplamiento cruzado de ejes (rad) | ≤0,001 | ≤0,001 | ≤0,001 |
| Ancho de banda (Hz) | ≥50 | ≥200 Hz | ≥200 |
| Precisión de navegación | |||
| Precisión de búsqueda del norte (°, 1σ) | ≤0,5 | ≤3 | / |
| Precisión inercial pura tras la pérdida de sincronización (1σ, 60 s, ignorando el error inicial) | ≤3 m/60 s | ≤5 m/60 s | ≤10 m/60 s |
| Precisión en la medición de altura | ≤5 cm | ≤5 cm | ≤5 cm |
| Posición horizontal combinada (m, 1σ) | ≤2 (punto único) | ≤2 (punto único) | ≤2 (punto único) |
| ≤0,02+1 ppm (RTK) | ≤0,02+1 ppm (RTK) | ≤0,02+1 ppm (RTK) | |
| Posición combinada hacia el cielo (m, 1σ) | ≤3 (punto único), | ≤3 (punto único), | ≤3 (punto único), |
| ≤0,03+1 ppm (RTK) | ≤0,03+1 ppm (RTK) | ≤0,03+1 ppm (RTK) | |
| Velocidad horizontal combinada (m/s, 1σ) | ≤0,05 | ≤0,05 | ≤0,05 |
| Velocidad combinada hacia el cielo (m/s, 1σ) | ≤0,1 | ≤0,1 | ≤0,1 |
| Rumbo combinado (°, 1σ, tiempo real) | ≤0,1 (antena doble de línea base de 2 m) | ≤0,1 (antena doble de línea base de 2 m) | ≤0,1 (antena doble de línea base de 2 m) |
| ≤0,15 (punto único, dinámico) | ≤0,15 (punto único, dinámico) | ≤0,2 (punto único, dinámico) | |
| ≤0,05 (RTK, dinámico) | ≤0,05 (RTK, dinámico) | ≤0,1 (RTK, dinámico) | |
| ≤0,03 (postprocesamiento) | ≤0,03 (postprocesamiento) | ≤0,05 (postprocesamiento) | |
| Actitud horizontal combinada (°, 1σ, tiempo real) | ≤0,015 (punto único, dinámico) | ≤0,015 (punto único, dinámico) | ≤0,05 (punto único, dinámico) |
| ≤0,01 (RTK, dinámico) | ≤0,01 (RTK, dinámico) | ≤0,03 (RTK, dinámico) | |
| ≤0,007 (postprocesamiento) | ≤0,007 (postprocesamiento) | ≤0,01 (postprocesamiento) | |
| Características físicas | |||
| Fuente de alimentación (V) | 9~36 | ||
| potencia en estado estacionario (W) | ≤4 | ||
| Tiempo de inicio (s) | ≤2 | ||
| Velocidad de datos (Hz, máx.) | 200 | ||
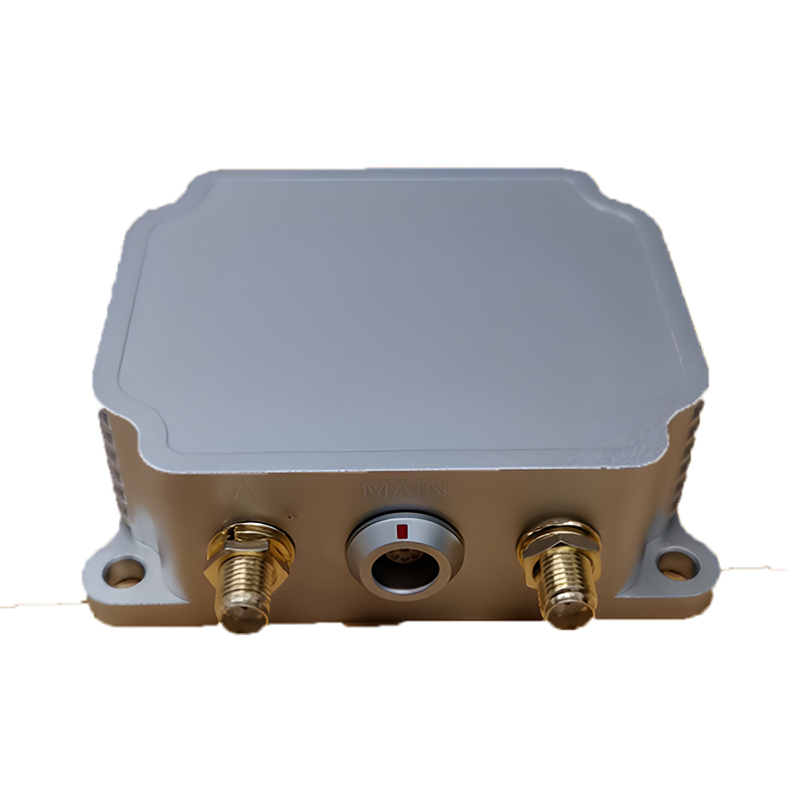
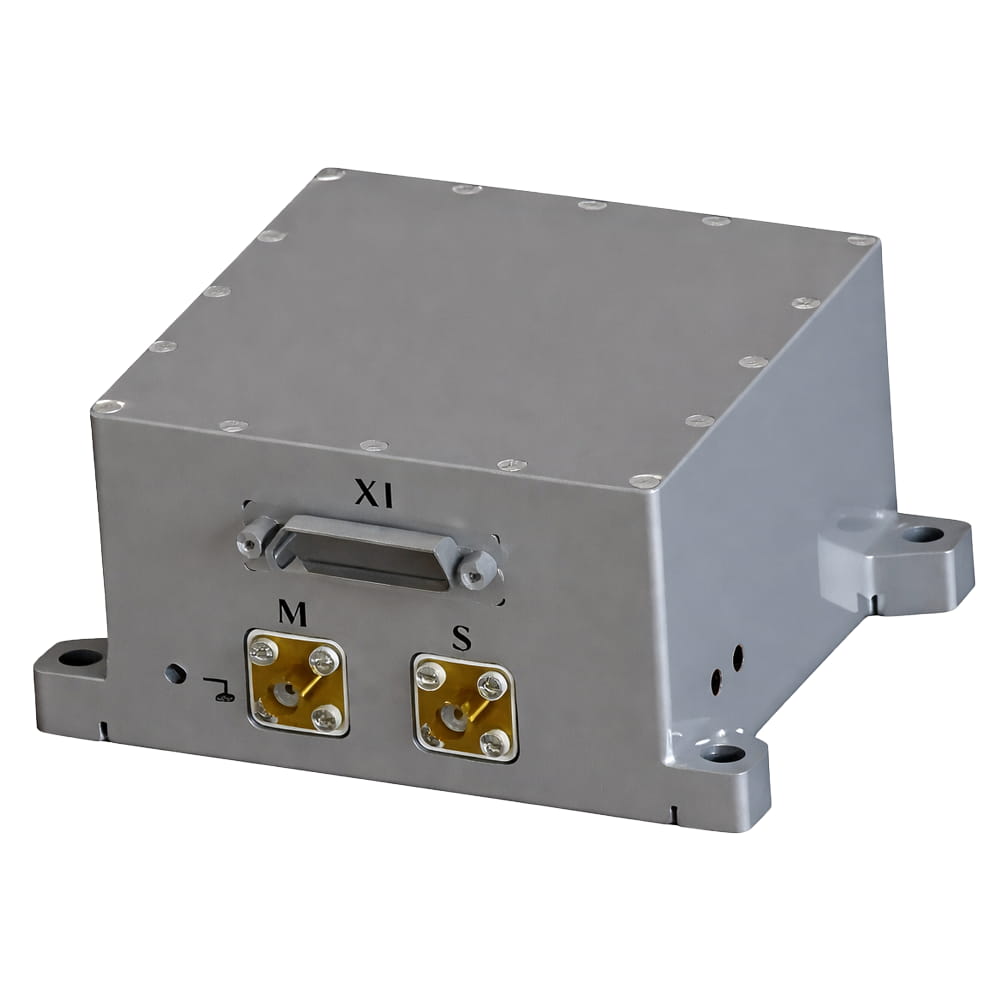
| Tamaño (mm×mm×mm) | 87×72×56 | ||
| Peso (g) | 370±20 | ||
| Entorno operativo | |||
| Temperatura de funcionamiento (°C) | -40~+80 | ||
| Temperatura de almacenamiento (℃) | -55~+85 | ||
| Vibración (g, RMS) | 20~2000 Hz, 6,06 | ||
| Choque (g) | 500 g/1 ms | ||
proceso de producción
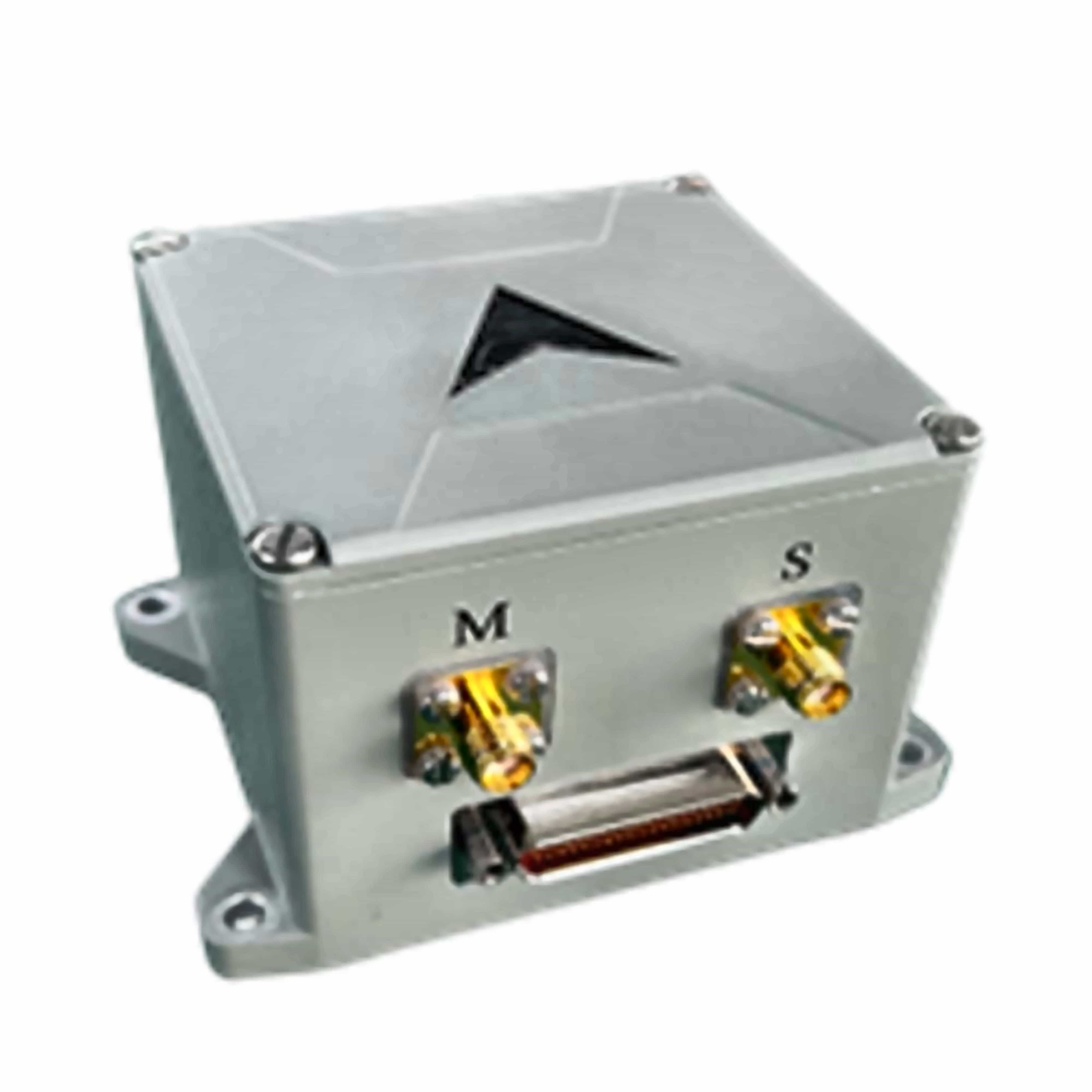
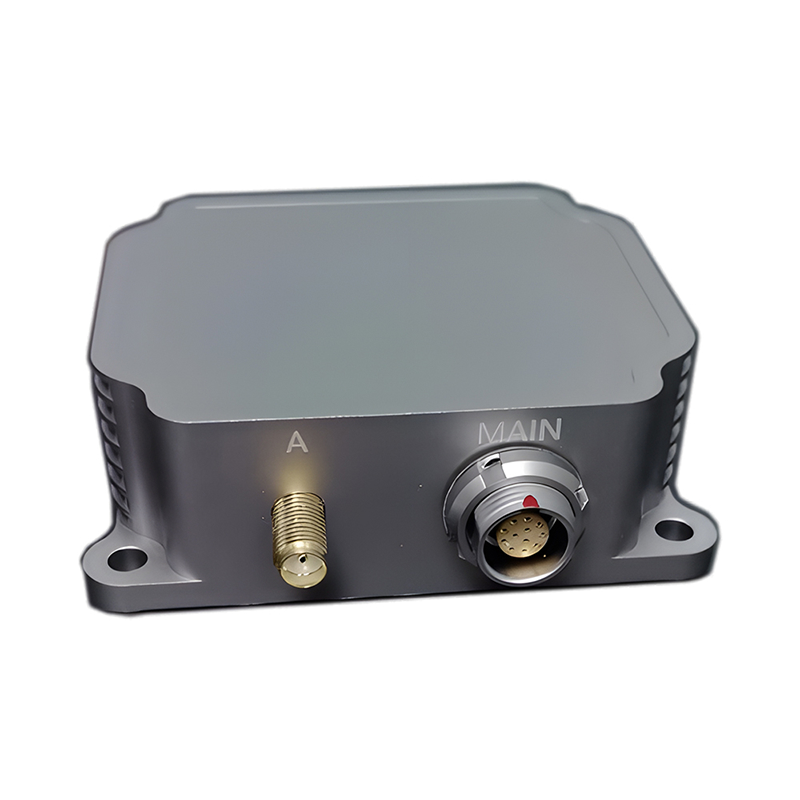
Dimensiones del producto


Escenarios de aplicación



Preguntas frecuentes






Xml política de privacidad blog Mapa del sitio
Derechos de autor @ Micro-Magic Inc Reservados todos los derechos.
 RED COMPATIBLE
RED COMPATIBLE



 Español
Español














