

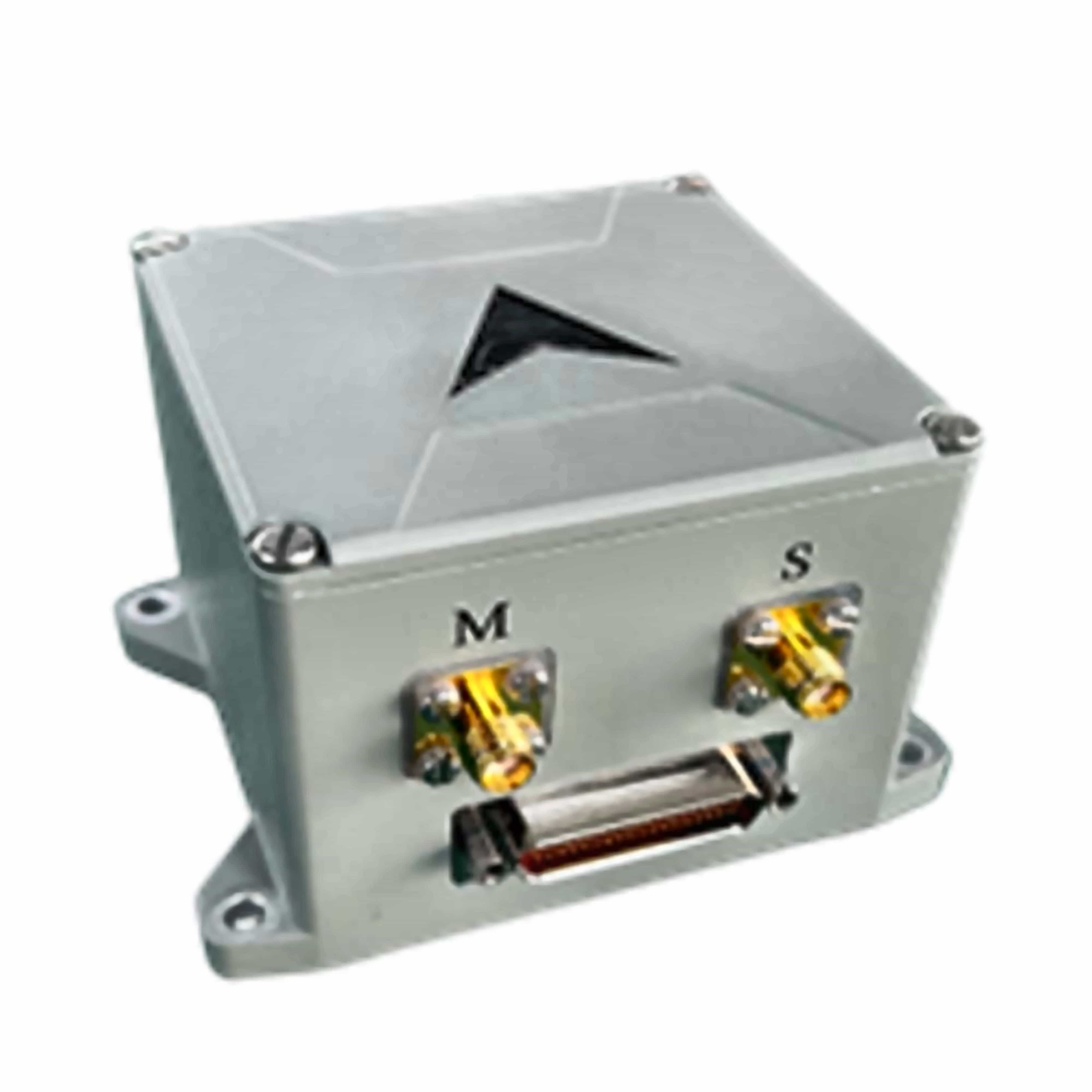
Sensor de navegación de antena única MEMS+GNSS con salida RS232/RS422 y soporte para RTK/Ntrip.
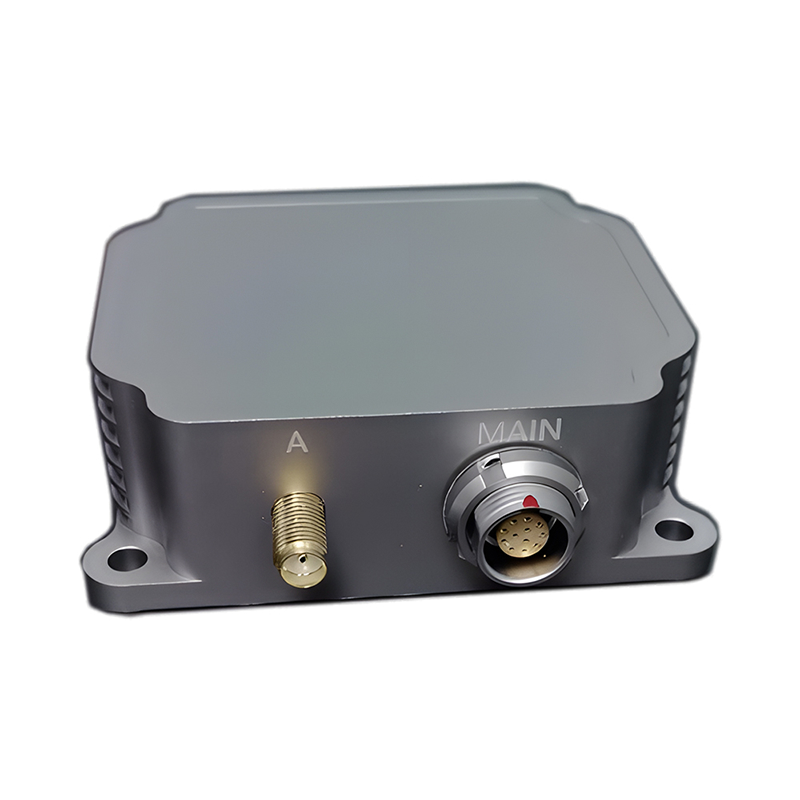
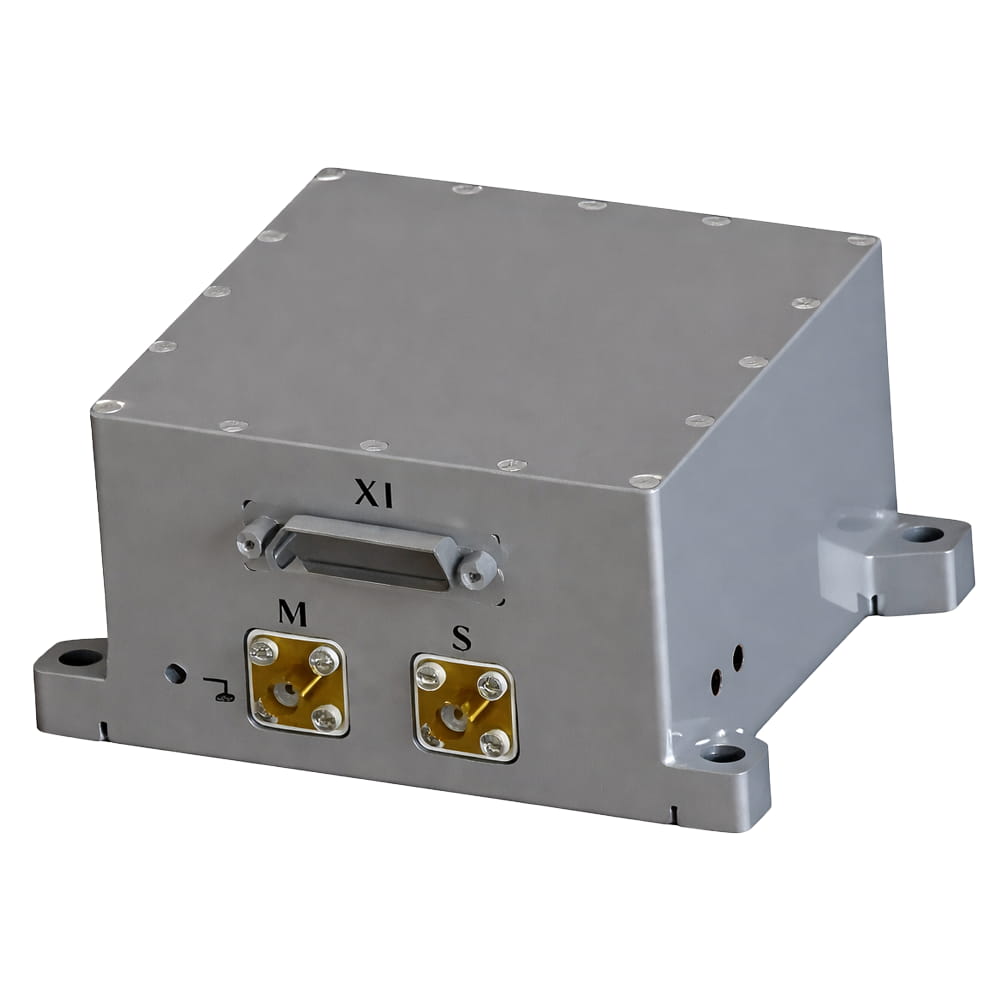
I3500 es un sistema de navegación integrado El sistema GNSS/INS está compuesto por sensores MEMS de alto rendimiento, sistemas GNSS de alta precisión y microprocesadores de alto rendimiento. El algoritmo de navegación integrado de alta fiabilidad, desarrollado internamente, proporciona en tiempo real la velocidad, la posición, la orientación y otra información del vehículo medido. Los usuarios también pueden conectar externamente datos de corrección diferencial RTCM para lograr un posicionamiento RTK de alta precisión. Su carcasa impermeable IP68 permite una fácil integración en el sistema del usuario. La información del modelo del producto es la siguiente:
Número de pieza, :
I3500Pedido (MOQ) :
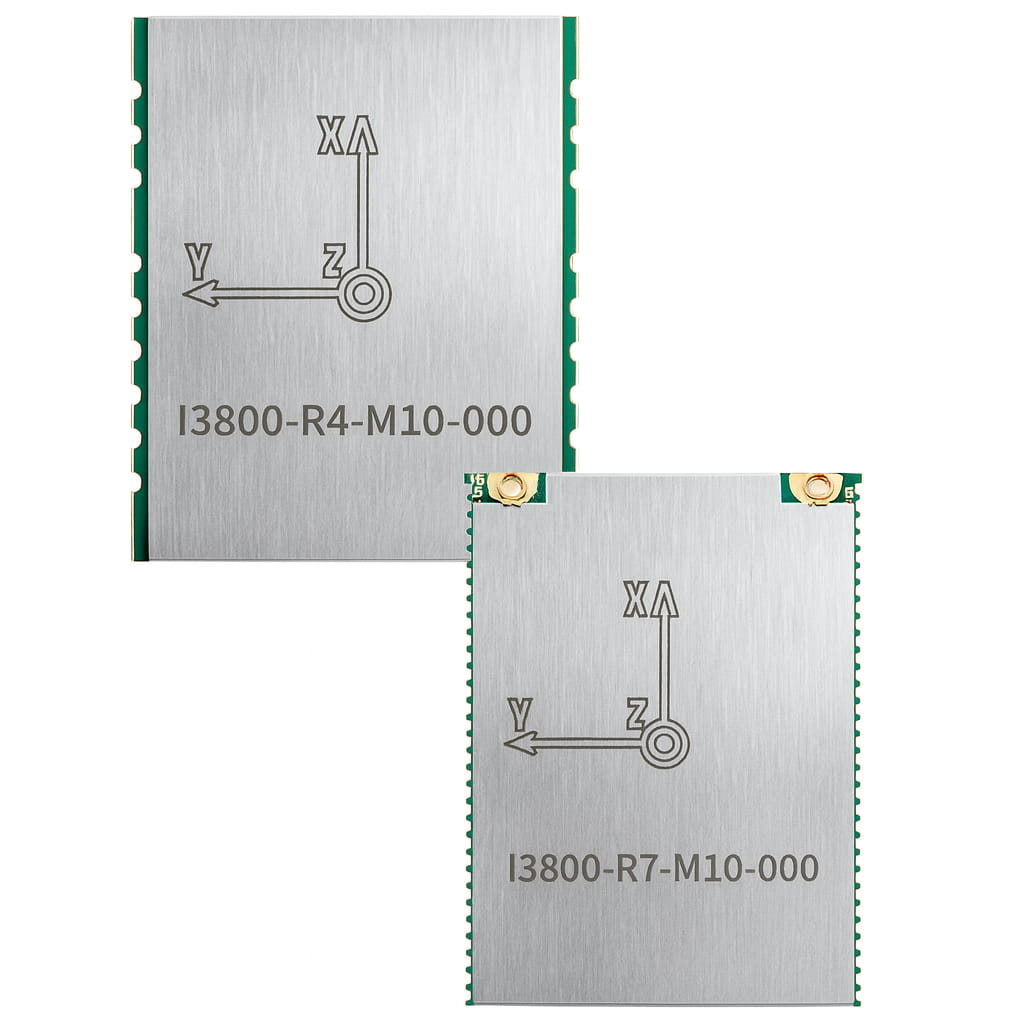
1Series de productos y parámetros

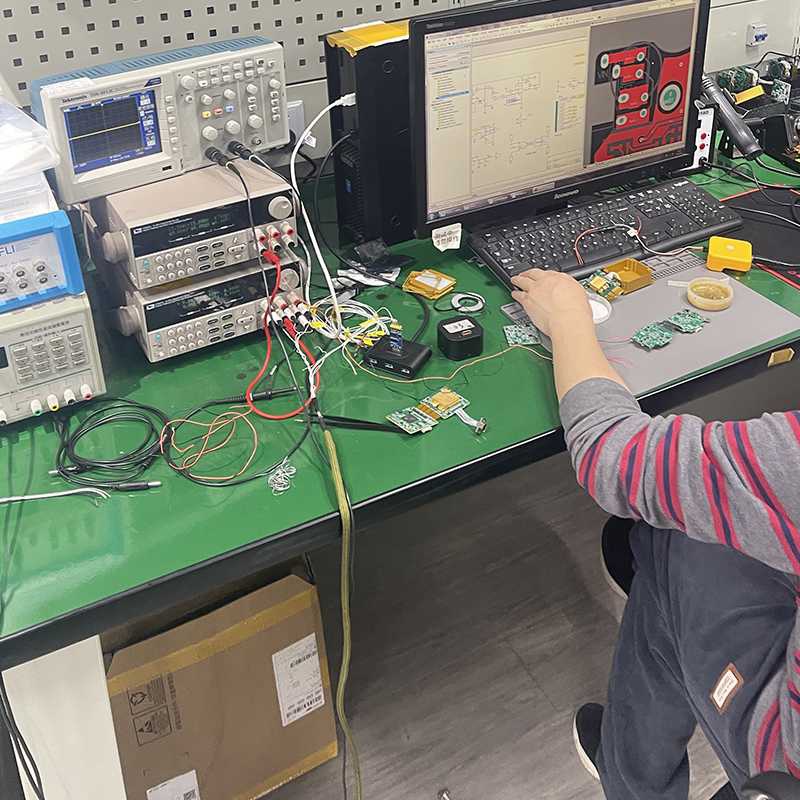
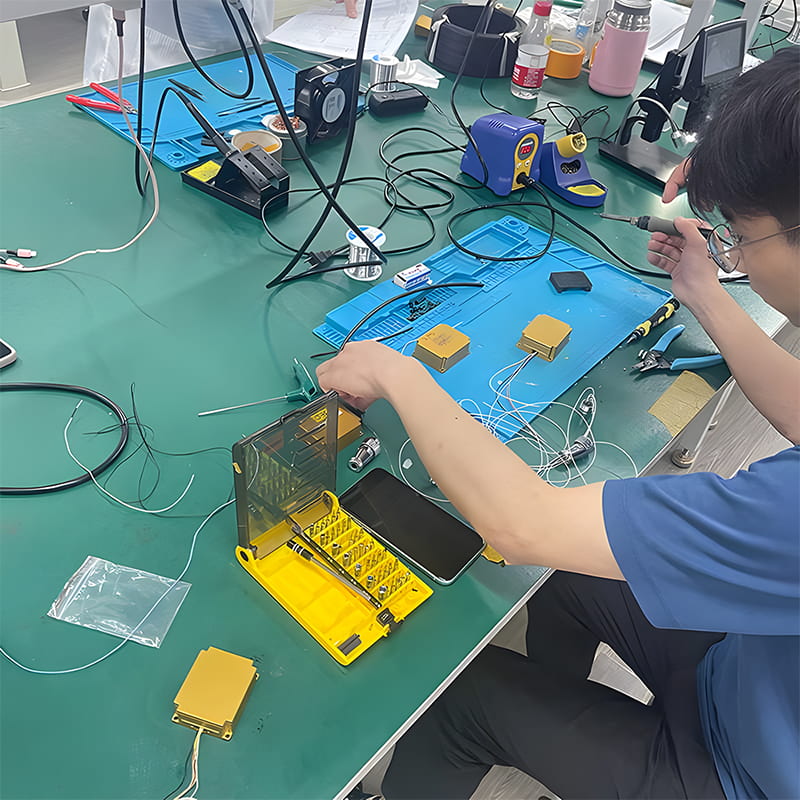
proceso de producción
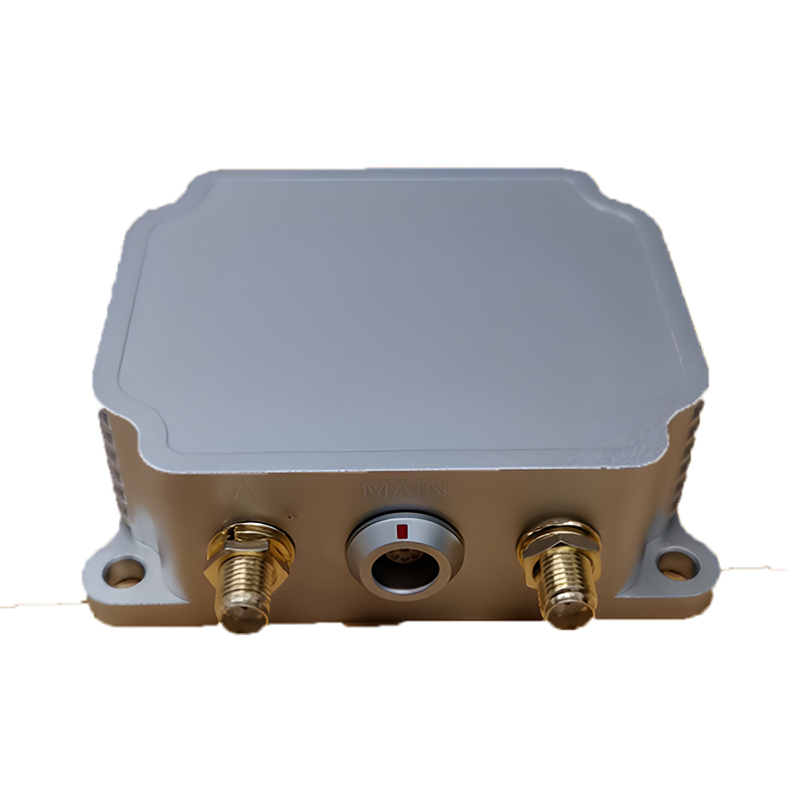
Dimensiones del producto

Escenarios de aplicación



Preguntas frecuentes






Xml política de privacidad blog Mapa del sitio
Derechos de autor @ Micro-Magic Inc Reservados todos los derechos.
 RED COMPATIBLE
RED COMPATIBLE



 Español
Español














