

Sistema de navegación inercial (INS) IF4060 de grado táctico basado en FOG – Desviación giroscópica de 0,03°/h (modelo C)


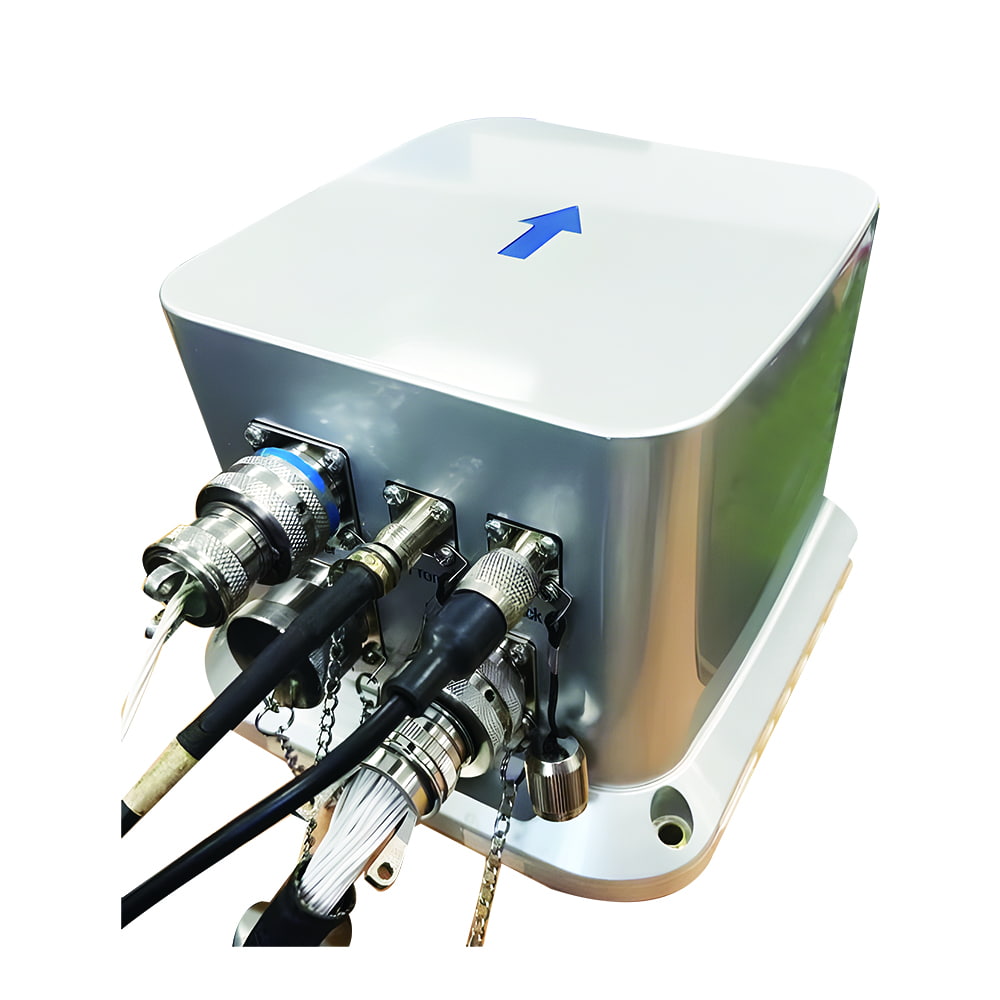
El sistema de navegación inercial de fibra óptica IF4060 consta principalmente de un giroscopio de fibra óptica miniaturizado, un acelerómetro flexible de cuarzo, un módulo de alimentación, un módulo de adquisición y procesamiento de datos y un módulo de navegación por satélite. Se caracteriza por su tamaño compacto, peso ligero y alta precisión, lo que lo hace adecuado para diversas aplicaciones, como drones pequeños y medianos, cápsulas electroópticas y robots submarinos. Sus principales características son las siguientes:
→ Tiene tres niveles de precisión: bajo, medio y alto, con precisiones de auto-determinación del norte de 0,2°, 0,1° y 0,06°, respectivamente.
→ Cuenta con múltiples modos de funcionamiento, incluyendo inercial puro, combinación inercial/satélite, combinación inercial/DVL, combinación inercial/odómetro, combinación inercial/visión y brújula marina.
→ Posee funciones como auto-determinación del norte, alineación por transferencia, alineación de base móvil asistida por satélite, postprocesamiento de alta precisión y medición de cabeceo.
→ Protocolos de comunicación múltiples integrados, con velocidad de transmisión y protocolo de salida del puerto serie configurables.
→ Temperatura de funcionamiento: -45℃~+70℃
→Cuenta con múltiples interfaces como RS422, RS232, Ethernet y entrada/salida PPS.
→ Fuente de alimentación: 12V~36V, consumo de energía <12W
→ Peso: 1,8 kg
→ Tamaño: 118 mm × 104 mm × 117 mm
Número de pieza, :
IF4060Pedido (MOQ) :
1Series de productos y parámetros
| IF4060-A |
| 0,1 segundos (Autoorientación hacia el norte) | 0,01 segundos (Autoorientación hacia el norte) | |||
| Precisión de la alineación de la actitud | 0,005° (1σ, búsqueda del norte por sí mismo), 0,008° (1σ, base móvil) | |||||
| precisión de mantenimiento de rumbo | 0,1°/h (inercia pura) | 0,05°/h (inercia pura) | 0,03°/h (inercia pura) | |||
| Precisión en el mantenimiento de la postura (RMS) | 0,02° (inercia pura) | 0,015° (inercia pura) | 0,01° (inercia pura) | |||
| 0,008° (combinación de satélites) | 0,008° (combinación de satélites) | 0,008° (combinación de satélites) | ||||
| Precisión de velocidad (RMS) | 0,02 m/s (RMS, navegación integrada, velocidad portadora inferior a 500 m/s) | |||||
| 3 m/s (inercia pura) | 1,5 m/s (inercia pura) | 1 m/s (inercia pura) | ||||
| Precisión de posición (CEP) | Horizontal <1,5 m de altura <3 m (RMS, navegación integrada, posicionamiento satelital de punto único, buena señal) | |||||
| Horizontal <1 cm + 1 ppm, vertical <2 cm + 1 ppm (RMS, con buen enlace diferencial de fase de la portadora satelital) | ||||||
| 4 millas náuticas/hora (inercia pura) | 2 millas/hora (inercia pura) | 1 milla/h (inercia pura) | ||||
| Tiempo de alineación | 5 minutos (autoorientación hacia el norte), 1 minuto (orientación asistida por doble antena), 15 minutos (base móvil) | |||||
| Giroscopio actuación | Rango | 500°/s | ||||
| Estabilidad con polarización cero | 0,2°/h (10 s, suave) | 0,1°/h (10 s, suave) | 0,06°/h (10 s, suave) | |||
| resolución | 0,01°/h | |||||
| ancho de banda | 400 Hz | |||||
| Acelerómetro actuación | Rango | 30 g | ||||
| Estabilidad con polarización cero | 50 µg | |||||
| Temperatura de funcionamiento | -45℃~70℃ | |||||
| Compatibilidad electromagnética | Cumplir con los requisitos pertinentes de GJB151B para aeronaves de la fuerza aérea. | |||||
| Interfaz | El modelo de conector de alimentación y comunicación es J30J-25ZK, que incluye interfaces como RS422, RS232, Ethernet y entrada/salida PPS, con la opción de personalizar una interfaz CAN. | |||||
| El conector de antena es SMA×2 | ||||||
| Tasa de actualización de datos | Datos de navegación: hasta 200 Hz | |||||
| Fuente de alimentación | Tensión nominal de 28 V CC, adaptable a 12 V~36 V. | |||||
| Consumo de energía | <12W | |||||
| Dimensiones generales | 118 mm × 104 mm × 117 mm (sin incluir el enchufe ni el respaldo) | |||||
| Peso | 1,8 kg | |||||
proceso de producción
Dimensiones del producto

Escenarios de aplicación



Preguntas frecuentes










Xml política de privacidad blog Mapa del sitio
Derechos de autor @ Micro-Magic Inc Reservados todos los derechos.
 RED COMPATIBLE
RED COMPATIBLE



 Español
Español













