

Sistema de navegación inercial de fibra óptica de alta precisión con doble antena GNSS+INS RTK para UAV, barcos y vehículos.


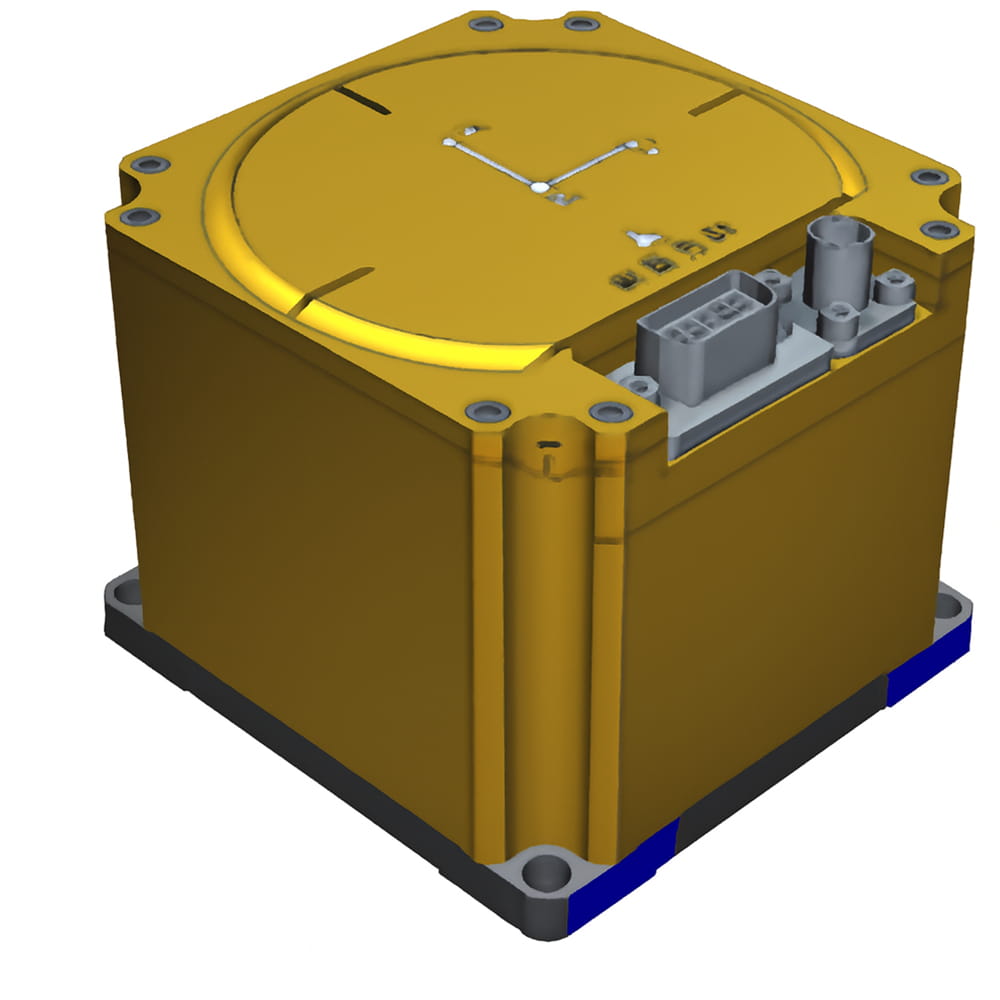
Este producto incorpora un giroscopio de fibra óptica de alta precisión de tres ejes, un acelerómetro flexible de cuarzo de alta precisión de tres ejes y un receptor GNSS multifrecuencia multimodo para topografía móvil, compatible con la función Beidou autónoma. Gracias a un algoritmo de navegación inteligente avanzado y al filtro de Kalman, se optimiza para la oclusión GNSS y la interferencia por trayectos múltiples, lo que permite medir con alta precisión la dirección, la actitud, la velocidad y la posición de los vehículos en movimiento.
Este sistema de navegación inercial también cuenta con múltiples interfaces de sensores, como GNSS, odómetro, DVL y altímetro barométrico, que pueden satisfacer adecuadamente los requisitos de aplicaciones de navegación a largo plazo, de alta precisión y alta fiabilidad en entornos complejos como cañones urbanos, y puede utilizarse para la navegación y el control de diversos sistemas no tripulados.
Las características del producto incluyen: determinación rápida y precisa del rumbo y la actitud iniciales, soporte para salida de rumbo y actitud en tiempo real, receptor GPS y Beidou de modo dual integrado, soporte para alineación rápida dinámica, diseño integrado de combinación INS/GNSS, soporte para posprocesamiento IE, algoritmo de filtro Kalman mejorado y resistencia a interferencias electromagnéticas y vibraciones. Puede utilizarse en navegación vehicular, aérea y marítima, control de estabilidad y otros campos.
Número de pieza, :
IF3600Pedido (MOQ) :
1Series de productos y parámetros
| Precisión de navegación integrada INS/GNSS | ||||
| Precisión de la actitud | Rumbo: ≤0,02° (1σ) | |||
| Cabeceo/balanceo: ≤0,005° (1σ) | ||||
| Precisión de posicionamiento | Posicionamiento de punto único: ≤2 m (50 % CEP) | |||
| RTK: ≤2 cm + 1 ppm (50 % CEP) | ||||
| Precisión de velocidad | ≤0,02 m/s (1σ) | |||
| Tiempo de alineación | Comienza después de obtener la latitud, la longitud y la altitud. Duración de la alineación: ≤5 min. | |||
| Precisión integrada del INS/Odómetro/DVL | 0,25 % × kilometraje (dependiendo de la precisión del odómetro o del DVL) | |||
| Precisión de navegación inercial pura | ||||
| Precisión de la actitud | Alineación de azimut: ≤0,1°sec(Φ) (1σ, Φ: latitud local) | |||
| Alineación horizontal: ≤0,008° (1σ) | ||||
| Mantenimiento de acimut: 0,03°/h (1σ) | ||||
| Mantenimiento horizontal: 0,02°/h (1σ) | ||||
| Precisión de posicionamiento | ≤1 milla náutica/h (50% CEP) | |||
| Características clave de los componentes | ||||
| Giroscopio | Rango | ±500°/s | Estabilidad de sesgo | 0,03°/h (1σ) |
| Acelerómetro | Rango | ±20 g | Estabilidad de sesgo | ≤20 μg (1σ) |
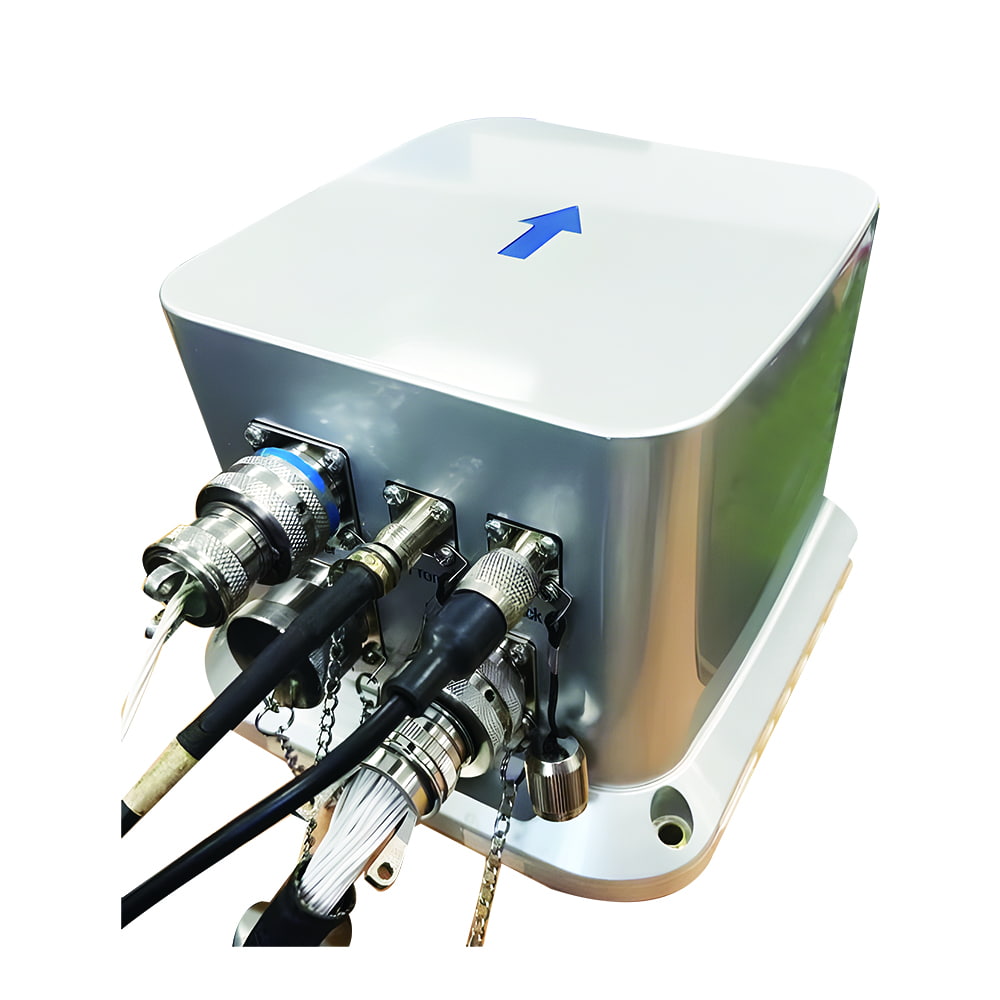
| Características físicas | Características de la interfaz | |||
| Voltaje de la fuente de alimentación | 24 V CC nominal (12–32 V CC) | Tipo de interfaz | 4 puertos serie (RS232/RS422) | |
| Consumo de energía | <20W | Señales compatibles: PPS, entrada/salida EVENTMARK | ||
| Temperatura de funcionamiento | -40℃ a +60℃ | Tasa de transmisión | 9600–921600 bps (configurable) | |
| Clasificación de protección | IP65 | Modos de usuario | ||
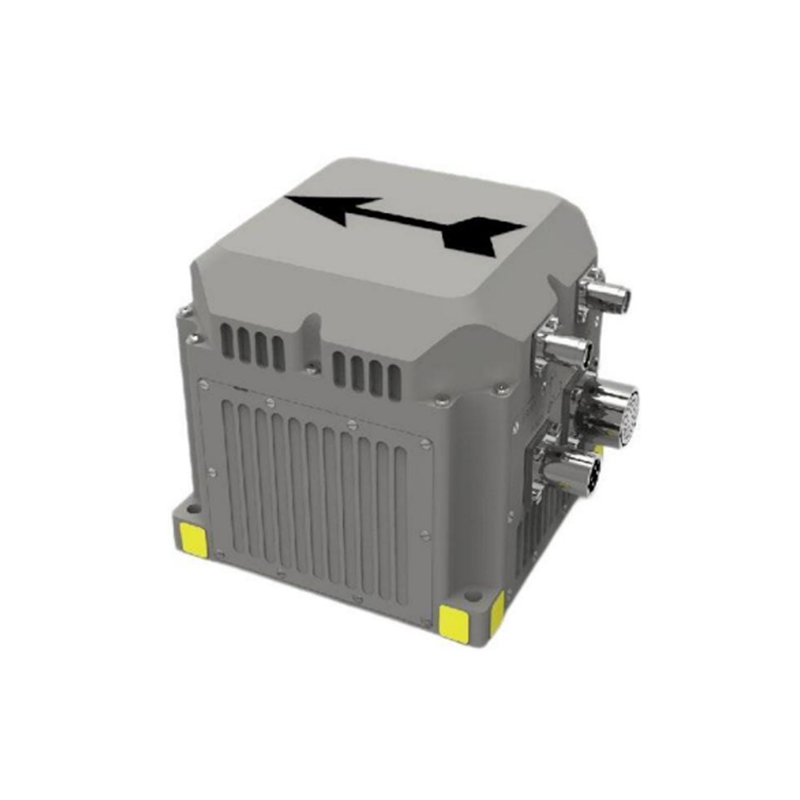
| Dimensiones | ≤136 mm × 136 mm × 150 mm | |||
| Peso | ≤3,8 kg | Montado en vehículo (predeterminado), Aerotransportado, A bordo de buque | ||
proceso de producción
Dimensiones del producto

Escenarios de aplicación



Preguntas frecuentes











Xml política de privacidad blog Mapa del sitio
Derechos de autor @ Micro-Magic Inc Reservados todos los derechos.
 RED COMPATIBLE
RED COMPATIBLE



 Español
Español













