Producto: Método de posicionamiento en tierra con IMU y cámara fija
Características clave:
Conclusión: Este método mejora la precisión y eficiencia del posicionamiento al tiempo que simplifica la calibración, con potencial para amplias aplicaciones en diversos campos tecnológicos.
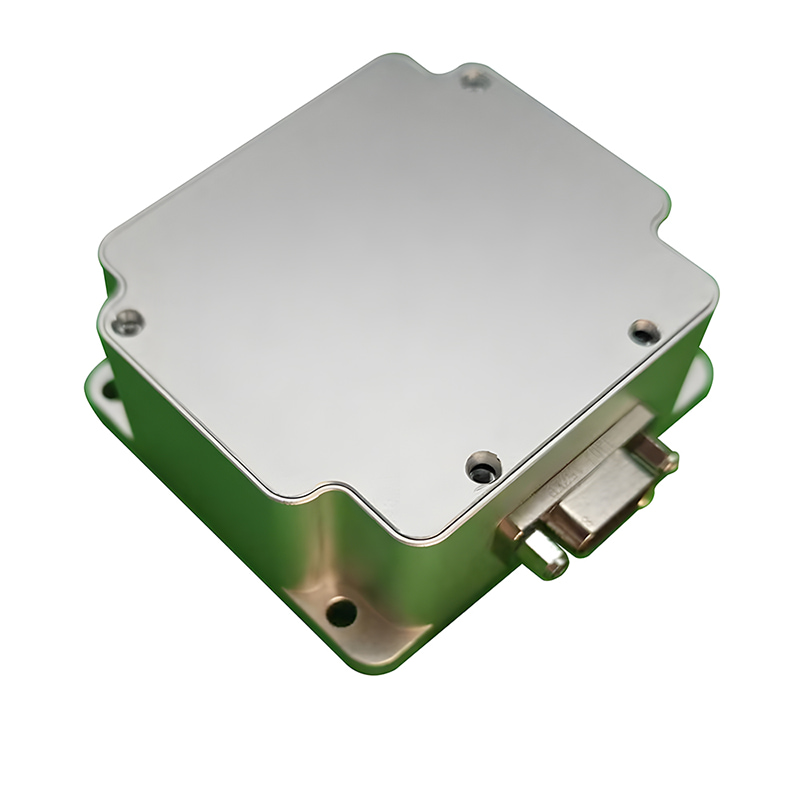
Un método de posicionamiento en el suelo en el que se instalan de forma fija una unidad de medición inercial (IMU) y una cámara. Combina la medición de actitud de alta precisión de la IMU y las capacidades de posicionamiento visual de la cámara para lograr un posicionamiento en el suelo eficiente y preciso. Aquí están los pasos detallados del método:
Primero, instale la IMU y la cámara firmemente para asegurarse de que la posición relativa entre ellas permanezca sin cambios. Este método de instalación elimina los tediosos pasos de calibrar la relación de instalación entre la cámara y la IMU en el método tradicional y simplifica el proceso de operación.
A continuación, la IMU se utiliza para medir la aceleración y la velocidad angular del portador en el sistema de referencia inercial. La IMU contiene un sensor de aceleración y un giroscopio, que pueden detectar el estado de movimiento del transportista en tiempo real. El sensor de aceleración es responsable de detectar la tasa de aceleración actual, mientras que el giroscopio detecta cambios en la dirección, el ángulo de balanceo y la actitud de inclinación del vehículo. Estos datos proporcionan información clave para el posterior cálculo de actitud y posicionamiento.
Luego, con base en los datos medidos por la IMU, la información de actitud del transportista en el sistema de coordenadas de navegación se calcula mediante un algoritmo integral de solución de actitud y operación. Esto incluye el ángulo de guiñada, el ángulo de cabeceo, el ángulo de balanceo, etc. del portaaviones. Debido a la alta frecuencia de actualización de la IMU, la frecuencia operativa puede alcanzar más de 100 Hz, por lo que puede proporcionar datos de actitud de alta precisión en tiempo real.
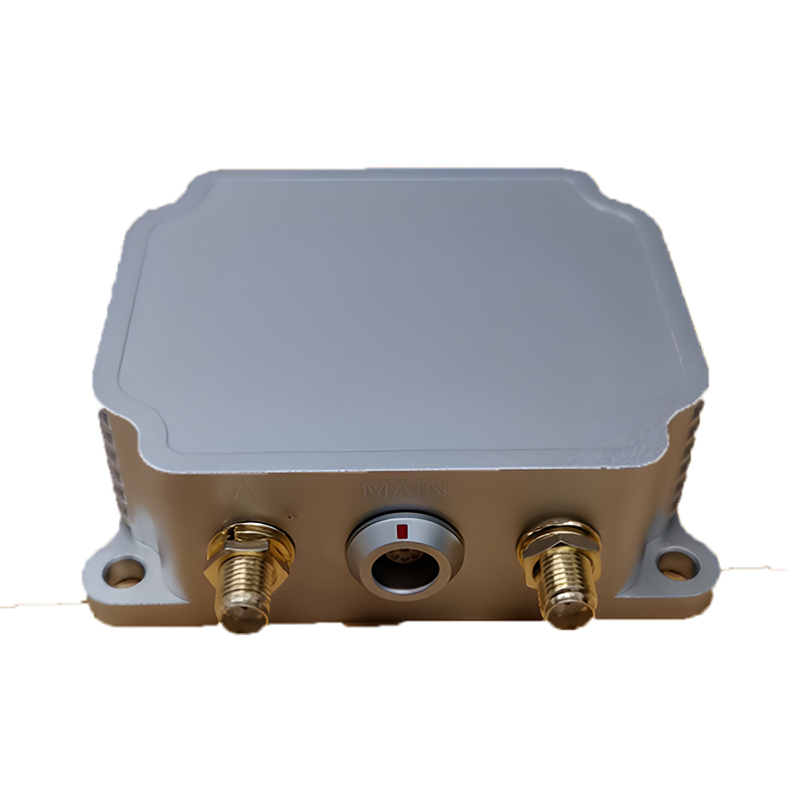
Al mismo tiempo, la cámara captura puntos característicos del terreno o información de puntos de referencia y genera datos de imágenes. Estos datos de imágenes contienen información espacial rica y pueden usarse para el procesamiento de fusión con datos de IMU.
A continuación, la información de actitud proporcionada por la IMU se fusiona con los datos de imagen de la cámara. Al hacer coincidir los puntos característicos de la imagen con puntos conocidos en el sistema de coordenadas geográficas, combinados con los datos de actitud de la IMU, se puede calcular la posición precisa de la cámara en el sistema de coordenadas geográficas.
Finalmente, la matriz de proyección se utiliza para cruzar la intersección de la línea normal para obtener la posición espacial del objetivo. Este método combina los datos de actitud de la IMU y los datos de imagen de la cámara para lograr una estimación precisa de la posición espacial del objetivo mediante el cálculo de la matriz de proyección y el punto de intersección.
Mediante este método, se puede lograr un posicionamiento en el suelo de alta precisión y alta eficiencia. La instalación fija de la IMU y la cámara simplifica el proceso de operación y reduce los errores de calibración. Al mismo tiempo, la combinación de la alta frecuencia de actualización de la IMU y la capacidad de posicionamiento visual de la cámara mejora la precisión del posicionamiento y el rendimiento en tiempo real. Este método tiene amplias perspectivas de aplicación en campos como los drones, los robots y la conducción autónoma.
Cabe señalar que, aunque este método tiene muchas ventajas, aún puede verse afectado por algunos factores en aplicaciones prácticas, como ruido ambiental, interferencia dinámica, etc. Por lo tanto, en aplicaciones prácticas, el ajuste y la optimización de parámetros deben realizarse de acuerdo con a condiciones específicas para mejorar la estabilidad y confiabilidad del posicionamiento.
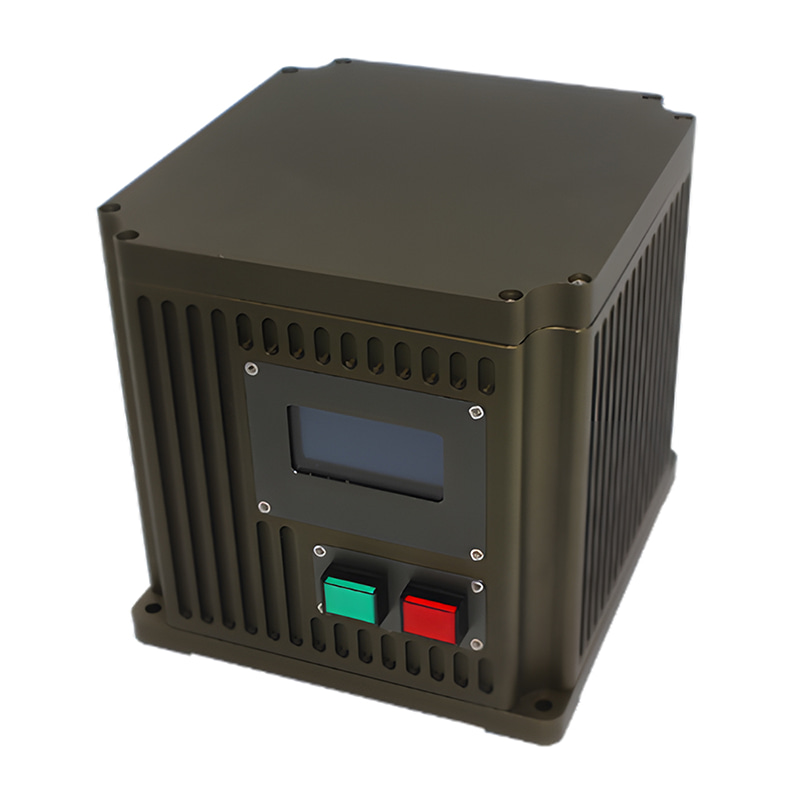
El artículo anterior describe el método de posicionamiento en el suelo cuando la IMU y la cámara están instaladas de forma fija. Describe brevemente la medición de actitud de alta precisión de la IMU y las capacidades de posicionamiento visual de la cámara, y puede lograr un posicionamiento en el suelo eficiente y preciso. El MEMS IMU desarrollado independientemente por Micro-Magic Inc tiene una precisión relativamente alta, como el U3000 y el U7000, que son más precisos y son productos de calidad para navegación. Puede localizar y orientar con precisión. Si desea saber más sobre IMU, comuníquese con nuestros técnicos profesionales lo antes posible.

Xml política de privacidad blog Mapa del sitio
Derechos de autor
@ Micro-Magic Inc Reservados todos los derechos.
 RED SOPORTADA
RED SOPORTADA



 Español
Español